
發(fā)布日期:2023-03-13 17:16 瀏覽次數(shù):
GB/T 38874的本部分規(guī)定了控制系統(tǒng)安全相關(guān)部件(SRP/CS)軟硬件設(shè)計(jì)與開發(fā)通則。
本部分適用于農(nóng)林拖拉機(jī)、農(nóng)用自走式機(jī)械、農(nóng)用全掛及半掛機(jī)械、農(nóng)用牽引機(jī)械,也適用于市政機(jī)械(例如:道路清掃機(jī))。
本部分不適用于:
——農(nóng)用飛機(jī)和農(nóng)用飛行器;
——草坪和園藝設(shè)備。
本部分規(guī)定了SRP/CS執(zhí)行安全相關(guān)功能所要求的特性及類別,本部分未規(guī)定用于特定場(chǎng)合的性能等級(jí)。
注1:機(jī)械特定C類標(biāo)準(zhǔn)可為其范圍內(nèi)的機(jī)械安全相關(guān)功能指定農(nóng)業(yè)性能等級(jí)(AgPL)。否則,AgPL的規(guī)范由制造商負(fù)責(zé)。
本部分適用于與機(jī)電系統(tǒng)有關(guān)的電氣/電子/可編程電子系統(tǒng)(E/E/PES)的安全部件。本部分涵蓋了E/E/PES安全相關(guān)系統(tǒng)(包括這些系統(tǒng)間的交互)的故障行為可能造成的危險(xiǎn)。本部分不涉及觸電、火災(zāi)、煙霧、高溫、輻射、毒性、易燃、化學(xué)反應(yīng)性、腐蝕、能量釋放等相關(guān)危險(xiǎn),除非直接由E/E/PES安全系統(tǒng)故障引起。本部分還涵蓋了在非E/E/PES危險(xiǎn)下E/E/PES安全相關(guān)系統(tǒng)的故障行為,涉及防護(hù)措施、保障措施或安全相關(guān)功能。
本部分包含以下范圍內(nèi)的示例:
——SRP/CS限制電動(dòng)混合動(dòng)力系統(tǒng)中的電流,以防止絕緣失效/電擊危險(xiǎn);
——SRP/CS的電磁干擾;
——SRP/CS的防火設(shè)計(jì)。
本部分不包含以下范圍內(nèi)的示例:
——摩擦導(dǎo)致電擊危險(xiǎn)產(chǎn)生的絕緣失效;
——影響附近機(jī)器控制系統(tǒng)的電磁輻射;
——腐蝕導(dǎo)致的電纜過熱。
本部分不適用于非電氣/電子/可編程電子系統(tǒng)(E/E/PES)(例如:液壓、機(jī)械或氣動(dòng))。
注2:參見ISO 12100中機(jī)械安全的設(shè)計(jì)通則。
本部分不適用于實(shí)施日期之前制造的控制系統(tǒng)安全相關(guān)部件。
下列文件對(duì)于本文件的應(yīng)用是必不可少的。凡是注日期的引用文件,僅注日期的版本適用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改單)適用于本文件。
GB/T 38874.1-2020 農(nóng)林拖拉機(jī)和機(jī)械 控制系統(tǒng)安全相關(guān)部件 第1部分:設(shè)計(jì)與開發(fā)通則(ISO 25119-1:2018,IDT)
GB/T 38874.2-2020 農(nóng)林拖拉機(jī)和機(jī)械 控制系統(tǒng)安全相關(guān)部件 第2部分:概念階段(ISO 25119-2:2018,IDT)
GB/T 38874.4-2020 農(nóng)林拖拉機(jī)和機(jī)械 控制系統(tǒng)安全相關(guān)部件 第4部分:生產(chǎn)、運(yùn)行、修改與支持規(guī)程(ISO 25119-4:2018,IDT)
3 術(shù)語和定義
GB/T 38874.1界定的術(shù)語和定義適用于本文件。
ISO和IEC標(biāo)準(zhǔn)術(shù)語數(shù)據(jù)庫的地址為:
——ISO在線瀏覽平臺(tái):https://www.iso.org/obp
——IEC電子百科:http://www.electropedia.org/
下列縮略語適用于本文件。
AgPL:農(nóng)業(yè)性能等級(jí)(agricultural performance level)
AgPL,:農(nóng)業(yè)性能等級(jí)要求(required agricultural performance level)
CAD:計(jì)算機(jī)輔助設(shè)計(jì)(computer-aided design)
Cat:硬件類別(hardware category)
CCF:共因失效(common-cause failure)
DC:診斷覆蓋率(diagnostic coverage)
DCvg:平均診斷覆蓋率(average diagnostic coverage)
ECU:電子控制單元(electronic control unit)
ETA:事件樹分析(event tree analysis)
E/E/PES:電氣/電子/可編程電子系統(tǒng)(electrical/electronic/programmable electronic systems)
EMC:電磁兼容(electromagnetic compatibility)
FMEA:失效模式及影響分析(failure mode and effects analysis)
FSM:功能安全管理(functional safety management)
FTA:故障樹分析(fault tree analysis)
HARA:危險(xiǎn)分析及風(fēng)險(xiǎn)評(píng)估(hazard analysis and risk assessment)
HIL:硬件在環(huán)(hardware in the loop)
MTTF:平均失效前時(shí)間(mean time to failure)
MTTFD:平均危險(xiǎn)失效前時(shí)間(mean time to dangerous failure)
MTTFpc:?jiǎn)瓮ǖ榔骄kU(xiǎn)失效前時(shí)間(mean time to dangerous failure for each channel)
PES:可編程電子系統(tǒng)(programmable electronic system)
QM:質(zhì)量度量(quality measures)
RAM:隨機(jī)存取存儲(chǔ)器(random-access memory)
SOP:開始生產(chǎn)(start of production)
SRL:軟件需求等級(jí)(software requirement level)
SRP:安全相關(guān)部件(safety-related parts)
SRP/CS:控制系統(tǒng)安全相關(guān)部件(safety-related parts of control systems)
UML:統(tǒng)一建模語言(unified modeling language)
5.1 目的
定義系統(tǒng)的詳細(xì)設(shè)計(jì),以滿足整個(gè)安全相關(guān)系統(tǒng)的安全需求。
5.2 概述
安全需求包括實(shí)現(xiàn)和確保功能安全的所有需求。在安全壽命周期內(nèi),在各層次級(jí)別上對(duì)安全需求進(jìn)行詳細(xì)的闡述和規(guī)定。圖1列出了安全需求的不同層次。安全需求開發(fā)過程的完整表述見5.4。為了對(duì)安全需求進(jìn)行管理,建議使用恰當(dāng)?shù)男枨蠊芾砉ぞ摺?/p>
附錄A給出了AgPL=e時(shí)的功能安全評(píng)估示例。
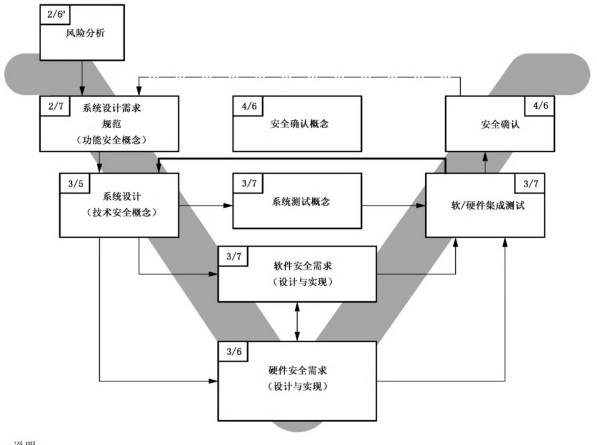
說明:
→結(jié)果;
←驗(yàn)證:
← -- —確認(rèn)。
用斜線隔開的2個(gè)數(shù)字中第1個(gè)數(shù)字代表GB/T 38874的相應(yīng)部分,第2個(gè)數(shù)字代表章條號(hào)。例如,2/6指GB/T 38874.2-2020的第6章,3/5指GB/T 38874.3-2020的第5章等。
圖1 安全需求構(gòu)建
5.3 前提條件
前提條件是功能安全概念(見GB/T 38874.2-2020的第7章)。
以上為標(biāo)準(zhǔn)部分內(nèi)容,如需看標(biāo)準(zhǔn)全文,請(qǐng)到相關(guān)授權(quán)網(wǎng)站購買標(biāo)準(zhǔn)正版。
